


- Descrição
Descrição
MENSAGEM DE SEGURANÇA
- Leia as instruções antes de começar.
- É recomendada a supervisão de um adulto.
- Este kit destina-se a crianças com mais de 8 anos.
- Este kit contém peças pequenas que podem causar asfixia se usado incorrectamente.
Manter fora do alcance de crianças com menos de 3 anos.
USO DE PILHAS
- Utiliza 2x pilhas 1.5V AAA (não incluídas).
- Para um bom funcionamento, utiliza sempre pilhas novas.
- Coloca as pilhas na posição correcta tendo sempre em conta as suas polaridades.
- Retira as pilhas do robot sempre que não o estiveres a usar.
- Troca a pilha sempre que a bateria termine para evitar estragar o aparelho.
- Retira pilhas recarregáveis do kit antes de as colocares a carregar.
- Pilhas recarregáveis devem ser postas a carregar com a supervisão de um adulto.
- Certifica-te que os terminais da pilha não estão em curto circuito.
- Não coloques pilhas não recarregáveis a carregar.
- Não misturar pilhas alcalinas, standard e recarregáveis.
- Não misturar pilhas alcalinas, pilhas standart, ou pilhas recarregáveis.
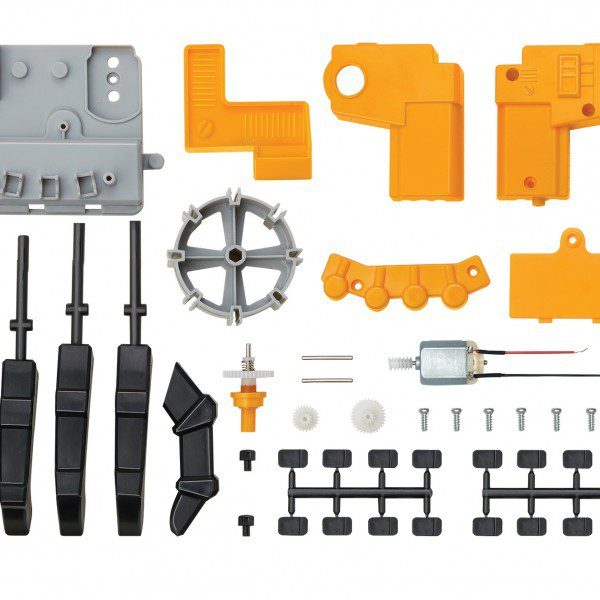
CONTEÚDO
A. Base
B. Dedo polegar
C. 2x Dedo com um triângulo
D. 2x Dedo com um quadrado
E. Tampa de dobradiças
F. Eixo da embraiagem
G. Motor
H Tampa do compartimento das pilhas
I. Tambor
J. Suporte do tambor
K. Tampa esquerda das engrenagens
L. Tampa direita das engrenagens
M. Conjunto de rodas dentadas pequenas
N. 2x Tampa de terminal
O. Parafusos
P. Conjunto de rodas dentadas grandes
Q. 2x Eixo
R. 16x Cavilhas. Também vais precisar [não incluído] de uma chave de parafusos e duas pilhas 1.5V AAA.
MONTAGEM
- Encaixa o motor na tampa das engrenagens direita, com os fios virados para baixo. Encaixa um eixo [Q] no buraco central como mostra o diagrama. Faz deslizar o conjunto de rodas dentadas maior [P] no eixo, com roda dentada pequena virada para cima.
- Encaixa o segundo eixo [Q] no buraco mais próximo da engrenagem helicoidal do motor. Faz deslizar conjunto de rodas dentadas menor [M] no eixo, com a roda dentada maior virada para cima. Os dentes da roda dentada maior devem engatar na engrenagem helicoidal do motor, e os dentes da roda dentada mais pequena devem engatar com os dentes da roda dentada maior do outro conjunto de rodas dentadas [P] – ver imagem.
- Faz passar os fios eléctricos do motor pelos orifícios e, com cuidado, coloca por cima a tampa esquerda. Fixa as duas metades com três parafusos.
- Coloca a base na tua mesa de trabalho. Faz passar os fios do motor pelos orifícios da base e, a seguir, encaixa a caixa que contém o motor na base.
- Segura na caixa de engrenagens, vira a base ao contrário e usa um parafuso para as fixar. Junta os dois fios vermelhos e coloca-os num terminal. Certifica-te que a parte metálica dos fios toca na parte metálica do terminal. Encaixa uma tampa de terminal para prender os fios. Faz o mesmo com os dois fios pretos no outro terminal.
- Coloca o tambor no eixo da caixa de engrenagens. Encaixa o suporte do tambor na base de modo a que o eixo encaixe no outro lado do tambor.
- Coloca os dois dedos com a marca de um triângulo nos dois pivots centrais, como na imagem.
- Coloca os dois dedos com a marca de um quadrado nos outros dois pivots, como na imagem.
- Coloca a tampa das dobradiças [E] em cima da base dos dedos e fixa-a com dois parafusos. Encaixa o dedo polegar no último pivot.
- Insere as duas pilhas 1.5V AAA no compartimento das pilhas. Certifica-te que são colocadas de forma correcta. Coloca a tampa das pilhas e fixa-a com um parafuso.
- Agora podes colocar as cavilhas no tambor para que quando ele comece a rodar as cavilhas façam os dedos levantar e cair. Faz as cavilhas deslizar nas ranhuras do tambor. Existe um espaço para quatro cavilhas em cada ranhura – uma para cada dedo. As cavilhas encaixam apenas num sentido. O padrão que usares com as cavilhas funcionam como uma programação que controla os dedos. Experimenta colocar as cavilhas como mostra o quadro 1 na imagem em cima. Começa por copiar a posição das cavilhas da primeira linha da imagem na primeira ranhura do tambor. Roda o tambor até que a próxima ranhura fique no topo e encaixa as cavilhas tal como mostra a imagem. Continua até todas as ranhuras estarem preenchidas.
- Liga a tua mão robot e o motor vai fazer o tambor rodar lentamente. As cavilhas vão fazer os dedos levantar e cair, criando o padrão do quadro 1. Experimenta criar os teus próprios padrões e regista-os nos quadros seguintes. Como é que os teus padrões soam?
COMO FUNCIONA?
O funcionamento da tua mão robot é simples. Quando a ligas, uma corrente eléctrica flui pelo motor fazendo-o girar. As rodas dentadas abrandam a velocidade proveniente do motor e fazem o tambor lentamente. Existe um sistema tipo torniquete na caixa de engrenagens que permite que o motor continue a rodar caso o tambor encrave. Isto protege as engrenagens e o motor. Cada dedo funciona como uma alavanca. Quando uma cavilha pressiona um dedo numa extremidade, a outra extremidade levanta.
RESOLUÇÃO DE PROBLEMAS
* Se o motor não rodar: certifica-te que as pilhas estão colocadas de forma correcta e que os fios eléctricos estão em contacto com a parte metálica dos terminais. * Se o tambor rodar no sentido contrário certifica-te que os dois fios vermelhos estão juntos e que os fios pretos estão juntos. * Se as engrenagens encravarem ou fizerem muito barulho, abre a caixa de engrenagens e coloca uma gota ou duas de óleo nas rodas dentadas. * Se os dedos não se moverem como deviam, certifica-te que as cavilhas estão devidamente alinhadas com os dedos.
CURIOSIDADES
* A tua mão robot é uma máquina programável! Alterar o padrão das cavilhas no tambor altera a forma como os dedos batem.
* Uma caixa de música tradicional funciona do mesmo modo que a tua mão robot. Elas têm um tambor com um padrão de pequenos pins que, quando o tambor roda, faz os dedos baterem numa mesa de som metálica. Cada dedo emite um som diferente.
* No passado, inventores construíram pessoas robotizadas chamadas autómatos. Os rostos e os membros do robot eram movidos através de mecanismos muito parecidos aos da tua mão robot.
* A primeira máquina programável foi um tear que teceu um pano. Os padrões no pano eram controlados através de uma série de cartões com buracos.